【學以精工】“明察秋毫”的北理工“小門神”
——GrC最優(yōu)論文助力北理工機器人足球隊勇奪全國冠軍
發(fā)布日期:2014-04-01 供稿:軟件科技創(chuàng)新創(chuàng)業(yè)基地 攝影:軟件科技創(chuàng)新創(chuàng)業(yè)基地
編輯:新聞中心 王征 閱讀次數(shù):
談到北理工的足球,師生們津津樂道于學校足球隊的馳騁奪冠,代表中國出征更是一展北理工學子的風采,。殊不知,,在北京理工大學的校園中還有一只足球冠軍隊,,而全國總冠軍的它們展示的則是北理工學子卓越的創(chuàng)新精神和科研能力,,這就是在2013年中國機器人大賽暨RoboCup公開賽上首次斬獲全國冠軍的北京理工大學機器人足球隊。
在這支總冠軍球隊中,,除了“能搶善射”的“前鋒”和“后衛(wèi)”們,,出奇制勝的法寶當屬其中“一夫當關(guān) 萬夫莫開”的北理工的“小門神”,它憑借超強的“守門意識”和敏銳的“洞察力”,,在比賽中“左撲右擋”,,成為奪冠的最大功臣。
奪冠的“幕后英雄”——軟件學院科創(chuàng)基地的師生們可謂傾盡心血,,他們以足球?qū)?zhàn)為實際應用背景,,圍繞球場對戰(zhàn)形勢變化快、防守難度大的實際問題,,提出了守門員區(qū)域劃分防守策略以及三維視覺模型技術(shù)應用的解決方案,,正是創(chuàng)新的技術(shù)策略成為了奪冠“秘籍”,基于此項創(chuàng)新,,軟件科技創(chuàng)新創(chuàng)業(yè)基地的馬辰,、閆梓禎、梁宇,、申宇,、徐杰,、齊冀、楊一川,、高黎明、張博偉,、金科等同學撰寫了題為《Defensive Strategy of the Goalkeeper Based on the 3D Vision and Field Division for the Middle-size League of RoboCup》的學術(shù)論文,,在2013年12月第九屆IEEE國際粒計算學術(shù)會議(IEEE GrC2013)上獲得了大會唯一的最優(yōu)論文獎(Best Paper Award)。
機器人世界杯(RoboCup)不僅僅是一項競賽活動,,其意義更加深遠,,是以多智能體系統(tǒng)(Multi-Agent System)和分布式人工智能(Distributed Artificial Intelligence)為主要研究背景的國際合作項目,該項目的最終目標是:到2050年,,開發(fā)完全自主仿人機器人隊,,能贏得人類足球世界冠軍隊。
機器人世界杯系列活動1997年首次舉辦,,現(xiàn)已成為世界上規(guī)模最大,、參與人數(shù)最多、學術(shù)成分最高的機器人賽事,,為了真正實現(xiàn)機器人團隊的競爭,,機器人足球隊要在智能體自主設(shè)計、多智能體協(xié)作,、策略獲取,、實時推理、機器人和傳感器融合等多方面實現(xiàn)技術(shù)融合,。在機器人足球系列賽事中,,全分布式和全自主的RoboCup中型組足球機器人是最理想的多智能體協(xié)同測試平臺,它能夠通過視覺系統(tǒng)與無線通信實時獲得信息,,實時地對賽場情況進行分析,、自主進行戰(zhàn)場形勢判斷、自主調(diào)整球隊內(nèi)部配合,、指揮機器人完成相關(guān)攻擊或防守動作,。因此中型組是機器人世界杯中學術(shù)含量最高、最具影響力與觀賞性的比賽項目,。
中型組足球機器人運動系統(tǒng)非常靈活,,運動速度可達15米/秒,踢球兇狠,,球速可達6米/秒,,還可以實現(xiàn)推射、挑射等多種射門方式,,瞬息萬變的場上形勢,,極難進行有效的防守,。因此,作為最后一道防線的守門員機器人就成為了比賽勝負的關(guān)鍵,。守門員機器人通過攝像頭獲取場上信息,,經(jīng)過數(shù)據(jù)分析發(fā)現(xiàn)來球方向后,由中央處理系統(tǒng)控制底部全向移動系統(tǒng)及伸縮臂防守系統(tǒng),,阻止進球,。傳統(tǒng)的守門員防守方法主要有兩種,一種是國際普遍采用的定點站位加伸縮臂防守法,,此種方法對高空球攔截成功率較高,,但面對高速球卻無能為力,另外一種是國內(nèi)球隊普遍采用的主動出擊封堵的防守策略,,此種方法可以提前封堵射門角度,,成功阻擋高速球,但是卻無法攔截角度刁鉆的吊射,。




正式基于對傳統(tǒng)守門員機器人防守方法的分析研究,,北理工機器人足球隊經(jīng)過探索,提出了守門員區(qū)域劃分防守策略及三維視覺模型技術(shù)相結(jié)合的防守方案,。區(qū)域劃分防守策略可以使守門員面對任何角度的射門都能采用合理的站位,,以獲得最大防守面積,移動最短的距離攔截射門,,而三維視覺模型技術(shù)則能夠?qū)崟r擬合高空球的飛行軌跡,,準確預判其落點。兩種技術(shù)的結(jié)合形成了全方位,、立體化的防守體系,,對目前出現(xiàn)的所有射門類型都可以有效阻擋,實現(xiàn)了對高速球和高空球的兼顧防守,,無論是極快的推射,,還是高空下墜球,都能較好地進行攔截,,極大的提高了守門員機器的防守能力,。
區(qū)域劃分防守策略
根據(jù)對球門威脅的不同,和足球比賽的規(guī)則,,可以將球場劃分多個區(qū)域,。場地劃分主要是根據(jù)球所在的位置進行的。而場地的分塊線,,主要是根據(jù)球的射門角作為主要依據(jù)的,。如圖1所示,假設(shè)P點和p1點為門前任意一點。當a=b時,,P點和P1對門的威脅程度相同,。
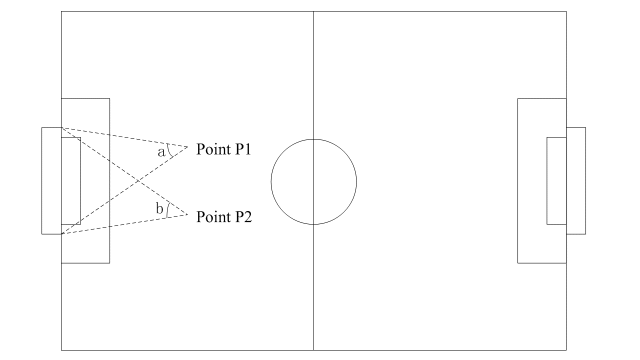
圖1
機器人足球比賽場地可以分為7個區(qū)域,如圖2所示,。其中,,區(qū)域0為球門區(qū),區(qū)域1和區(qū)域3為低危險區(qū),,區(qū)域2為大禁區(qū),,區(qū)域4和區(qū)域5為次危險區(qū),區(qū)域6為危險區(qū),。區(qū)域7為安全區(qū),。
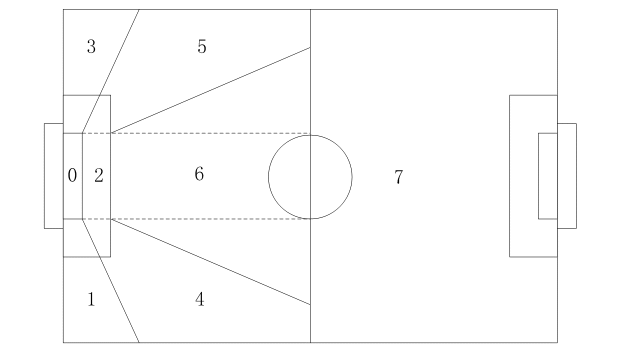
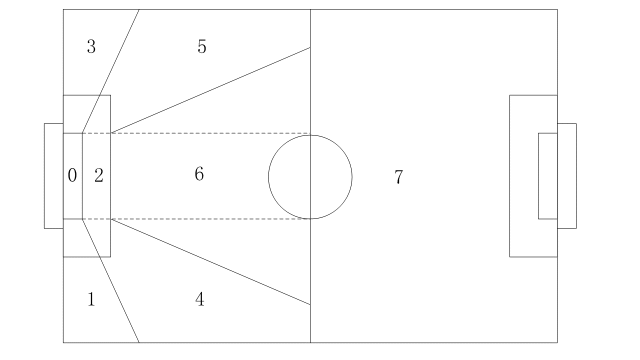
圖2
區(qū)域0為球門區(qū),,當球進入球門區(qū)時,,守門員主動上前拼搶足球,并踢出足球,。區(qū)域1和區(qū)域3為低危險區(qū),,所以守門員采用定點防守站位法站位,即站在大禁區(qū)邊線上,,足以擋住射門角度,。區(qū)域2為大禁區(qū),這時射門角度達到了極大值,。根據(jù)對手的進攻特點,,可以選擇上前拼搶、貼身防守或中角線最優(yōu)站位法防守,。中角線最優(yōu)站位法是指在射門角角平分線與足球到門線的中線兩者與門線的交點及門線所形成的的區(qū)域內(nèi)進行實時移動防守的策略,,移動區(qū)域選取方法如圖3所示。該策略能及時的根據(jù)球的位置,,調(diào)整自己的站位,,達到一個最優(yōu)的防守位置。區(qū)域4和區(qū)域5為次危險區(qū),,在這個區(qū)域,,對方球員的射門角度不大,這時候采用中角線最優(yōu)站位法,。足球在區(qū)域6的時候,,射門角度僅次于大禁區(qū)。足球在該區(qū)域時,,雙方拼搶頻繁,,射門次數(shù)也很多,所以采用延長線法。足球在區(qū)域7,,即為在對方半場,,這時候我方球門是安全的。所以守門員不需要任何移動,,站在球門中心點即可,。
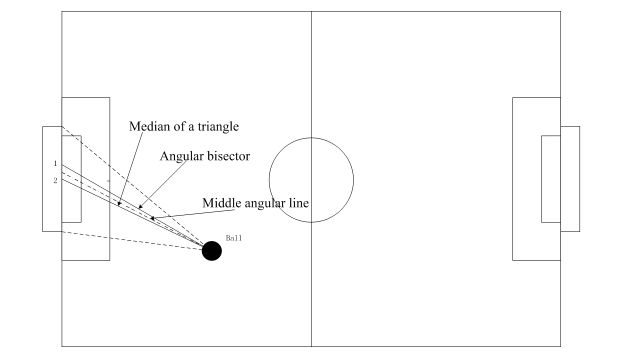
圖3 中角線防守策略示意圖
經(jīng)過對場地劃分之后,守門員對球場上任意位置的來球都能做出最合理的移動站位和最正確的處理行為,,降低了守門員防守的代價,,提高了防守的成功率。
三維視覺模型技術(shù)
中型組機器人足球比賽的對抗性極強,,機器的移動速度極快,,因此對機器人的反應能力有很大的要求。對守門員來說,,其應對的是對方的高速射門,,所以球定位的速度及準確度要求尤為嚴格。但是限于機器搭載的計算機的處理能力,,難以達到這樣實時處理圖像的要求,。為解決此問題我們提出了視覺自適應系統(tǒng)的解決方案。該系統(tǒng)以人為事先預定的知識為依據(jù),,然后由機器對環(huán)境逐步自學習,、自適應,表現(xiàn)為越來越準確的識別效果,。同時為了降低所需要處理數(shù)據(jù)的空間復雜度,,視覺系統(tǒng)將原有的全局搜索變?yōu)榫植扛櫍褂昧W訛V波算法,,建立物體特征的離散模型,,并增加中值濾波來對所記錄的物體特征進行更新以達到對物體的特征跟蹤和學習的同步。同時處理的數(shù)據(jù)也由原本的圖像矩陣,,減少為100到200的特征點的權(quán)值和坐標分布,。最后再輔助以霍夫變換等圖像處理方法,實現(xiàn)對球,、障礙物,、場線的快速識別,使機器可以實時掌握賽場信息,。該系統(tǒng)識別效果如圖4所示,。
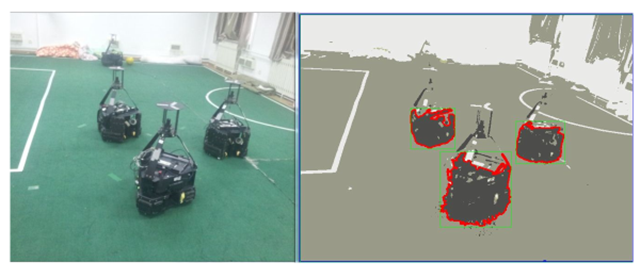
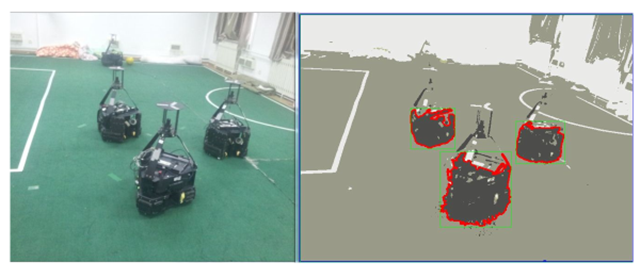
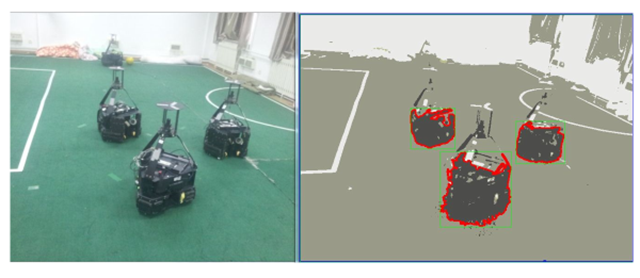
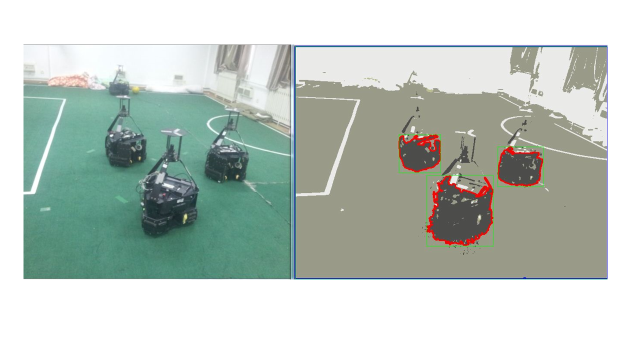
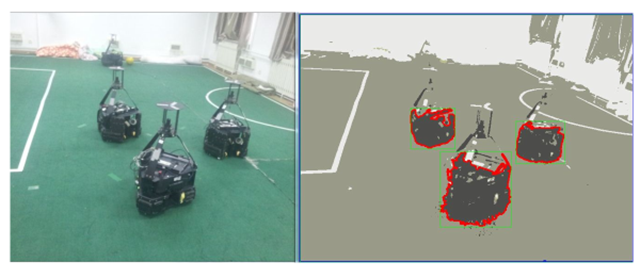
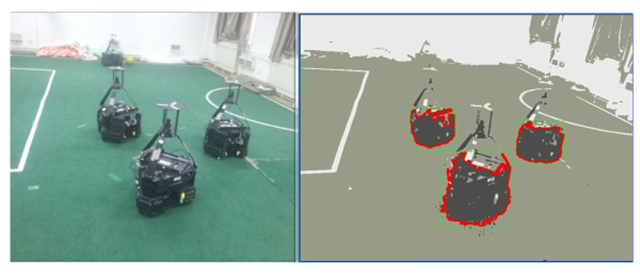 圖4
圖4 中型組機器人普遍采用全景反射鏡頭來獲取球場的全向信息。但是該種鏡頭會受到其高度的限制,,高過反射鏡的圖像無法獲取,,因此守門員機器對比賽中常常出現(xiàn)的遠距離吊射無法應對。因此,論文提出引入雙目視覺對球場進行三維建模,,基于視差原理,,通過相機標定、顏色分割,、物體識別,、三位測距四個步驟的處理,機器人即可以獲得3D圖像,。北理工機器人足球隊使用的是兩個廣角120度攝像頭,,采用廣角鏡頭是為了增加機器的可視范圍以及降低成本,但是所得到的圖像畸變嚴重,。因此后期采用算法進行了矯正處理,,效果如圖5及圖6所示。經(jīng)處理得到3D圖像后,,我們可以獲取高空球飛行的4到5幀的圖像,,并能得到每幀圖像中足球的坐標信息,利用曲線擬合我們即能預判出足球的飛行軌跡,,從而得到足球的落點位置,,擬合結(jié)果如圖7所示,。
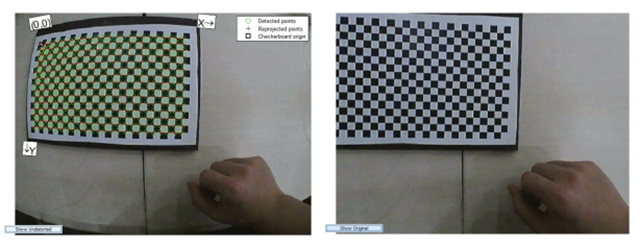
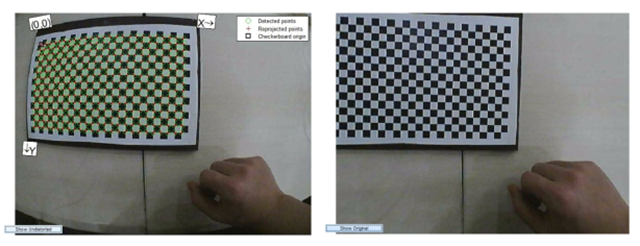
圖5(左為校正前,,右為校正后)
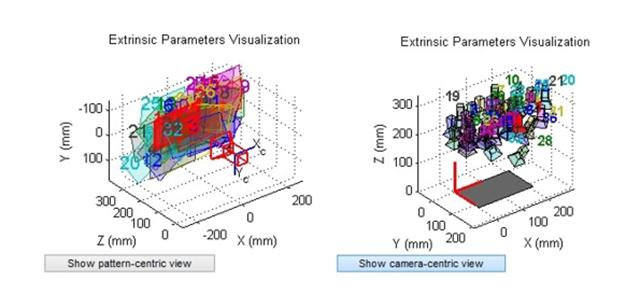
圖6(作為校正前圖像信息,右為校正后圖像信息)
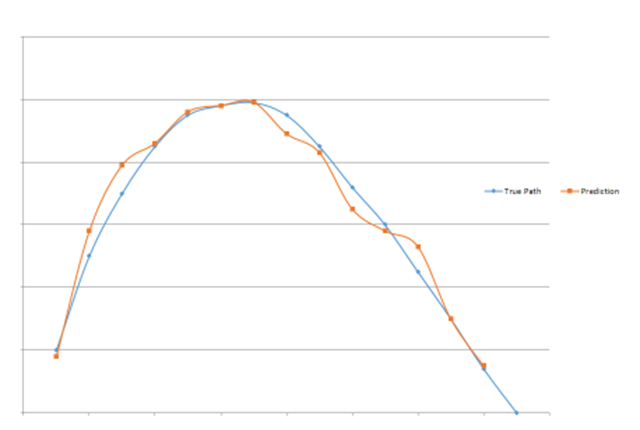
圖7
經(jīng)過在訓練場地測試,,以及在比賽實戰(zhàn)中檢驗,,守門員機器可以在防守中采取準確的站位,移動最短的距離獲得最大的防守面積,,同時對高空球也可以準確判斷方向和落點,,提前移動阻擋來球。
采用了區(qū)域劃分防守策略以及三維視覺模型技術(shù)以后,,北理工機器人足球隊的守門員機器人比以前更加靈活,,提高了對足球位置的識別率,增加對高空球落點預判的能力,,在測試場地上,,可以攔截進攻隊員在球場任何位置上的多種類型的全部射門。在與世界冠軍Water隊的較量中,,全場比賽Water隊射正球門20次,,但北理工機器人足球隊僅丟一球,成功率高達95%,。參考球隊在國際和國內(nèi)賽場的表現(xiàn),,該方案是世界上較優(yōu)的守門員防守策略之一。目前該套策略正逐漸被國內(nèi)多支球隊直接采用,同時也被國外的球隊學習,、參考,。
北京理工大學機器人足球隊(Robit隊)成立于2011年5月,團隊由來自軟件學院,、宇航學院,、機電學院、信息與電子學院,、自動化學院,、設(shè)計與藝術(shù)學院的的22名同學組成。團隊以參加機器人足球中型組比賽為契機,,致力于在人工智能領(lǐng)域做出成績,,研究方向涵蓋硬件設(shè)備設(shè)計與制造、自動控制,、機器視覺,、多智能體協(xié)同等。球隊曾獲2011年中國機器人大賽暨RoboCup中國公開賽機器人足球中型組項目季軍(一等獎),,技術(shù)挑戰(zhàn)賽(規(guī)定項目)二等獎,,技術(shù)挑戰(zhàn)賽(自選項目)二等獎;2013年RoboCup機器人世界杯取得機器人足球中型組項目第四名,;2013年中國機器人大賽暨RoboCup中國公開賽機器人足球中型組項目冠軍(一等獎),,技術(shù)挑戰(zhàn)賽(規(guī)定項目)亞軍(一等獎),技術(shù)挑戰(zhàn)賽(自選項目)亞軍(一等獎),。兩年來,,團隊發(fā)表學術(shù)論文六篇,申報國家專利1項,。
備注:球隊長期歡迎全校各專業(yè)優(yōu)秀學生加盟,,有意者可聯(lián)系球隊現(xiàn)役隊長徐杰([email protected]),球隊網(wǎng)站鏈接:http://ai.bitss.com.cn/,。
分享到: