【電腦報】中國無人駕駛冠軍車煉成記
發(fā)布日期:2013-11-29 閱讀次數(shù):

不用考駕照,上班路上人們可以騰出雙手做自己想做的事,盲人和老人也可以享受駕駛的樂趣,路上不會有交通事故,交警檢查誰還在手動駕駛……”世博會上對2030年的無人駕駛和車聯(lián)網(wǎng)商用的暢想,對北京理工大學智能車輛研究所的龔建偉博士來說,也是他研究無人駕駛車的動力和目標。
10天前,由國家自然科學基金委員會主辦的第五屆“中國智能車未來挑戰(zhàn)賽”上,來自國內(nèi)多所高校及科研機構(gòu)的17支參賽車隊參與角逐,北理工的車隊脫穎而出,龔建偉及其團隊研發(fā)的第7代無人駕駛車“RAY”獲得總冠軍,龔建偉離心中的目標又進了一步。
11月2日至4日,江蘇常熟市,天氣晴好。
“我們的無人車不能在大雨天行駛,對于雨雪天氣的處理,傳感器信息會受到干擾,另外,一些外接設(shè)備在雨天可能失靈。”龔建偉說比賽前還是有些擔心天氣不好。
智能車挑戰(zhàn)賽是在真實城郊道路和城區(qū)道路環(huán)境中進行的公開比賽,包括城郊道路(18公里)和城區(qū)道路(5公里)兩個賽段。
據(jù)北理工參賽的老師介紹,與前四屆比賽相比,此次比賽選擇了更加復雜的道路環(huán)境,增加了拱橋、匝道口等場景。
城郊道路的考核點包括動態(tài)車輛干擾、交通信號燈識別、施工繞行、避障等,城區(qū)道路的考核點包括遇到行人停車讓行,U-TURN、路口通行、學校門前減速慢性等。
在出發(fā)點,參賽的車輛車型各異,因各研發(fā)機構(gòu)控制的方法不同,因此車的裝備也很不一樣。有的車上還有和機械手一樣的自動駕駛儀,有多個外接電機。北理工車隊有三輛車參賽,其中“RAY”顯得最清爽,從外觀看,只在車頂有一攝像頭,車前裝有激光雷達和毫米波雷達,車身就是從4S店買來的比亞迪汽車。車內(nèi)駕駛座旁的顯示屏是給研發(fā)人員查看車況的,中控系統(tǒng)放在后排椅子下,電腦主機在后備箱。駕駛座、方向盤與我們平常車一樣沒有外接設(shè)備。
按比賽要求,出發(fā)前30分鐘,氣動電腦,把路網(wǎng)文件通過U盤拷到車載電腦上,規(guī)劃路徑。車載軟件系統(tǒng)要能夠自動處理該路網(wǎng)文件。在起始線前方,處于自主駕駛狀態(tài)的參賽車輛在接收到路網(wǎng)文件后,應(yīng)識別啟動信號燈組,在綠燈亮起后3分鐘內(nèi)啟動車輛,超過三分鐘撤出當前比賽,重新排隊出發(fā)。“RAY”看到綠燈亮起,穩(wěn)穩(wěn)起步。
每一輛無人駕駛車后都有一輛跟蹤記錄的裁判車,但不能通過無人車外的電腦指揮,控制權(quán)都在車上的系統(tǒng)上。

“在考點1,快到無信號燈的十字路口,前方一輛有人駕駛的直行車輛通過,RAY按路徑規(guī)劃要右轉(zhuǎn),沒問題,RAY減速、停下等前方直行車過,然后右轉(zhuǎn)。”龔建偉說在第二個考點,遇到紅綠燈,RAY大約花10秒看到紅燈亮,然后減速停車。
RAY不是第一個發(fā)車,但RAY的速度較快,比賽中超越了幾輛速度較慢的賽車,第一天城郊的比賽,第二個到達終點。第二天的城區(qū)比賽,RAY表現(xiàn)優(yōu)異。
不是每輛參賽車都能順利完成考點任務(wù),有的途中無故停下不動,有的翻車,有的速度太慢。
評委們按照安全性、智能、平穩(wěn)性和速度給參賽車打分,RAY最后以綜合分第一的成績奪冠。
“第三天還有一場場地挑戰(zhàn)賽,我們用RAY腦控完成了比賽。”龔建偉說的腦機控制就是研發(fā)人員戴上特制帽子,可以檢測頭部的信號,轉(zhuǎn)換成電腦指令,控制汽車。腦機研究是另一個研發(fā)團隊的成果,RAY的控制接口開放,就可以實現(xiàn)按照人的意識開車。
車里的人腦子里想著開車,汽車就會啟動,前面有彎道,轉(zhuǎn)彎,OK,車就轉(zhuǎn)彎。“以后在高速路上,腦子里想找加油站,車就會開往最近的休息區(qū)加油站。”龔建偉說腦機控制目前還僅限于場地測試,信息監(jiān)測與處理反應(yīng)速度太慢是主要原因。
記者看了龔教授錄制的視頻,相對于城郊路上無人駕駛幾十公里的時速,腦機控制車行速度的確緩慢。
高路上對無人駕駛車而言,是最好的路況環(huán)境。比賽完后,龔建偉帶著隊員從江蘇回北京的路上還測試了一段RAY的性能。
“大約100公里的高速路,RAY無人駕駛狀態(tài)跑了約1小時,最高時速120公里,這100公里路上車少,RAY只超了幾輛貨車。”
“其他時段我們還是人工駕駛RAY回來的。”
“無人駕駛車也可以人工駕駛?”對記者的疑惑,龔建偉讓記者坐上RAY,在北理工校園里人工駕駛跑了200米。
“這就是4S店買來的車,我們并未作硬件改造,當然可以無人駕駛和人工駕駛切換。”
龔建偉解釋道“我們與比亞迪有深度合作,在已有的車載CAN總線基礎(chǔ)上,通過設(shè)置通訊協(xié)議并進行智能化改造,實現(xiàn)對車輛運動狀態(tài)的讀取并對車輛運動進行控制。”
從今年3月份開始,北理工項目組人員出差深圳20多人次,和比亞迪技術(shù)人員經(jīng)過3個多月的軟件程序改造,車輛本身沒有任何硬件和機構(gòu)方面的改動,完成速銳車的自動駕駛改造;同時,由北京理工大學在比亞迪北京4S店購置新車,上牌照后重新升級車內(nèi)控制程序,實現(xiàn)了自動駕駛。
到11月比賽前,完成“RAY”的感知、規(guī)劃決策和路徑規(guī)劃與跟蹤系統(tǒng)的測試,并完成近700km的無人駕駛道路測試。
龔建偉眼中的自動駕駛沒有太多神秘,其實是對環(huán)境的視聽感知與學習,基本配置是電腦、攝像頭、雷達及聲音感知器件。
其中工控機負責車體定位、路徑規(guī)劃、路徑跟蹤、決策融合和控制,對環(huán)境的識別、障礙物的識別、交通標志的識別也是工控計算機的任務(wù)。
RAY裝備的工控機性能與一般的筆記本性能相當,攝像頭也不是非常昂貴,價值幾千元,車前的兩種雷達探測40米近距離和100米遠距離的物體,聲音感應(yīng)器用來區(qū)別后方來的車是否救護車、救火車之類,同時作出判斷讓路。據(jù)介紹,RAY總體改造成本大約30萬元,加上十幾萬元的買車款,不到50萬元。

“這樣說來,發(fā)燒友也可以做這方面的研究?”
“當然,我估算了一下,如果加載的設(shè)備不用太精良,10萬元也可以做無人駕駛車。我們會把研發(fā)的一些成果,比如軟件模塊放在網(wǎng)上給愛好者下載,加上以后車聯(lián)網(wǎng)實現(xiàn),又可以減少車上的一些感應(yīng)器,通過車聯(lián)網(wǎng),靠近的車可以相互交換信息,知道旁邊車的行駛路徑和速度,自然不會發(fā)生交通事故。”
北理工研發(fā)無人駕駛車,始于1995年,當時與國防科大、南京理工、浙江大學、清華大學一起研發(fā)的第一代無人駕駛車,現(xiàn)在還在北理工的陳列室里。
然后是第二代、第三代,其應(yīng)用已經(jīng)在軍事領(lǐng)域初見成效。無論是龐大的裝甲車,還是小巧的模型車,無人駕駛的智能化程度在逐步提升。
2000年起,北理工的團隊獨立研發(fā)無人車,最近剛成立了“地面無人系統(tǒng)研究院”,集合計算機、自動化、車輛工程等專業(yè)人才研發(fā)無人駕駛系統(tǒng)。“我們能奪冠的優(yōu)勢在于對汽車工程的深入了解,還在人工智能上有長期技術(shù)積累的總結(jié)。”
“明年,‘視聽覺信息的認知計算’重大研究計劃將要實現(xiàn)2000km以上的長距離無人行駛目標,北理工的無人車會通過2000公里的高速路測試,我們計劃從北京跑到深圳。”龔建偉團隊與比亞迪的合作還將繼續(xù)。
為了提升穩(wěn)定性和可靠性,研發(fā)團隊將進項大量道路測試及相關(guān)研究工作,提升改平臺在自動駕駛方面的性能與指標,保證軟件代碼的可靠性和擴展性,同時,對電動助力系統(tǒng)長時間工作的可靠性進行實驗測試,采用更大功率的轉(zhuǎn)向電機控制器,提高對于多種路面的適應(yīng)性。
在操作方便性方面,將在短時間內(nèi)增加方向盤干預(yù)方式,即在自動駕駛模式下,只要人一握方向盤及其他操作件,就能感知到人的干預(yù),自動退出自動駕駛模式。
“還將在電動汽車、混合動力汽車平臺上探索無人駕駛車輛技術(shù),研究新能源車輛實現(xiàn)無人駕駛的特點。”
在龔建偉提供的視頻中,無人駕駛車載碼頭集裝箱貨物集中的地方已經(jīng)有應(yīng)用試驗,相對單純的路線、路況,是碼頭貨運車采用無人駕駛的一個有利條件。

業(yè)界對車聯(lián)網(wǎng)的態(tài)度也將決定無人駕駛車的研發(fā)進程。專家預(yù)估未來兩三年,車聯(lián)網(wǎng)在北京、上海的試行,將帶動無人駕駛和人工駕駛進入混合運行模式。
10天前,由國家自然科學基金委員會主辦的第五屆“中國智能車未來挑戰(zhàn)賽”上,來自國內(nèi)多所高校及科研機構(gòu)的17支參賽車隊參與角逐,北理工的車隊脫穎而出,龔建偉及其團隊研發(fā)的第7代無人駕駛車“RAY”獲得總冠軍,龔建偉離心中的目標又進了一步。
賽場內(nèi)外的比拼
11月2日至4日,江蘇常熟市,天氣晴好。
“我們的無人車不能在大雨天行駛,對于雨雪天氣的處理,傳感器信息會受到干擾,另外,一些外接設(shè)備在雨天可能失靈。”龔建偉說比賽前還是有些擔心天氣不好。
智能車挑戰(zhàn)賽是在真實城郊道路和城區(qū)道路環(huán)境中進行的公開比賽,包括城郊道路(18公里)和城區(qū)道路(5公里)兩個賽段。
據(jù)北理工參賽的老師介紹,與前四屆比賽相比,此次比賽選擇了更加復雜的道路環(huán)境,增加了拱橋、匝道口等場景。
城郊道路的考核點包括動態(tài)車輛干擾、交通信號燈識別、施工繞行、避障等,城區(qū)道路的考核點包括遇到行人停車讓行,U-TURN、路口通行、學校門前減速慢性等。
在出發(fā)點,參賽的車輛車型各異,因各研發(fā)機構(gòu)控制的方法不同,因此車的裝備也很不一樣。有的車上還有和機械手一樣的自動駕駛儀,有多個外接電機。北理工車隊有三輛車參賽,其中“RAY”顯得最清爽,從外觀看,只在車頂有一攝像頭,車前裝有激光雷達和毫米波雷達,車身就是從4S店買來的比亞迪汽車。車內(nèi)駕駛座旁的顯示屏是給研發(fā)人員查看車況的,中控系統(tǒng)放在后排椅子下,電腦主機在后備箱。駕駛座、方向盤與我們平常車一樣沒有外接設(shè)備。
按比賽要求,出發(fā)前30分鐘,氣動電腦,把路網(wǎng)文件通過U盤拷到車載電腦上,規(guī)劃路徑。車載軟件系統(tǒng)要能夠自動處理該路網(wǎng)文件。在起始線前方,處于自主駕駛狀態(tài)的參賽車輛在接收到路網(wǎng)文件后,應(yīng)識別啟動信號燈組,在綠燈亮起后3分鐘內(nèi)啟動車輛,超過三分鐘撤出當前比賽,重新排隊出發(fā)。“RAY”看到綠燈亮起,穩(wěn)穩(wěn)起步。
每一輛無人駕駛車后都有一輛跟蹤記錄的裁判車,但不能通過無人車外的電腦指揮,控制權(quán)都在車上的系統(tǒng)上。
2013年11月4日上午于江蘇常熟閉幕式廣場進行的腦控車輛演示場景
“在考點1,快到無信號燈的十字路口,前方一輛有人駕駛的直行車輛通過,RAY按路徑規(guī)劃要右轉(zhuǎn),沒問題,RAY減速、停下等前方直行車過,然后右轉(zhuǎn)。”龔建偉說在第二個考點,遇到紅綠燈,RAY大約花10秒看到紅燈亮,然后減速停車。
RAY不是第一個發(fā)車,但RAY的速度較快,比賽中超越了幾輛速度較慢的賽車,第一天城郊的比賽,第二個到達終點。第二天的城區(qū)比賽,RAY表現(xiàn)優(yōu)異。
不是每輛參賽車都能順利完成考點任務(wù),有的途中無故停下不動,有的翻車,有的速度太慢。
評委們按照安全性、智能、平穩(wěn)性和速度給參賽車打分,RAY最后以綜合分第一的成績奪冠。
“第三天還有一場場地挑戰(zhàn)賽,我們用RAY腦控完成了比賽。”龔建偉說的腦機控制就是研發(fā)人員戴上特制帽子,可以檢測頭部的信號,轉(zhuǎn)換成電腦指令,控制汽車。腦機研究是另一個研發(fā)團隊的成果,RAY的控制接口開放,就可以實現(xiàn)按照人的意識開車。
車里的人腦子里想著開車,汽車就會啟動,前面有彎道,轉(zhuǎn)彎,OK,車就轉(zhuǎn)彎。“以后在高速路上,腦子里想找加油站,車就會開往最近的休息區(qū)加油站。”龔建偉說腦機控制目前還僅限于場地測試,信息監(jiān)測與處理反應(yīng)速度太慢是主要原因。
記者看了龔教授錄制的視頻,相對于城郊路上無人駕駛幾十公里的時速,腦機控制車行速度的確緩慢。
高路上對無人駕駛車而言,是最好的路況環(huán)境。比賽完后,龔建偉帶著隊員從江蘇回北京的路上還測試了一段RAY的性能。
“大約100公里的高速路,RAY無人駕駛狀態(tài)跑了約1小時,最高時速120公里,這100公里路上車少,RAY只超了幾輛貨車。”
“其他時段我們還是人工駕駛RAY回來的。”
與“RAY”同行
“無人駕駛車也可以人工駕駛?”對記者的疑惑,龔建偉讓記者坐上RAY,在北理工校園里人工駕駛跑了200米。
“這就是4S店買來的車,我們并未作硬件改造,當然可以無人駕駛和人工駕駛切換。”
龔建偉解釋道“我們與比亞迪有深度合作,在已有的車載CAN總線基礎(chǔ)上,通過設(shè)置通訊協(xié)議并進行智能化改造,實現(xiàn)對車輛運動狀態(tài)的讀取并對車輛運動進行控制。”
從今年3月份開始,北理工項目組人員出差深圳20多人次,和比亞迪技術(shù)人員經(jīng)過3個多月的軟件程序改造,車輛本身沒有任何硬件和機構(gòu)方面的改動,完成速銳車的自動駕駛改造;同時,由北京理工大學在比亞迪北京4S店購置新車,上牌照后重新升級車內(nèi)控制程序,實現(xiàn)了自動駕駛。
到11月比賽前,完成“RAY”的感知、規(guī)劃決策和路徑規(guī)劃與跟蹤系統(tǒng)的測試,并完成近700km的無人駕駛道路測試。
龔建偉眼中的自動駕駛沒有太多神秘,其實是對環(huán)境的視聽感知與學習,基本配置是電腦、攝像頭、雷達及聲音感知器件。
其中工控機負責車體定位、路徑規(guī)劃、路徑跟蹤、決策融合和控制,對環(huán)境的識別、障礙物的識別、交通標志的識別也是工控計算機的任務(wù)。
RAY裝備的工控機性能與一般的筆記本性能相當,攝像頭也不是非常昂貴,價值幾千元,車前的兩種雷達探測40米近距離和100米遠距離的物體,聲音感應(yīng)器用來區(qū)別后方來的車是否救護車、救火車之類,同時作出判斷讓路。據(jù)介紹,RAY總體改造成本大約30萬元,加上十幾萬元的買車款,不到50萬元。
無人駕駛汽車的各種電子部件
“這樣說來,發(fā)燒友也可以做這方面的研究?”
“當然,我估算了一下,如果加載的設(shè)備不用太精良,10萬元也可以做無人駕駛車。我們會把研發(fā)的一些成果,比如軟件模塊放在網(wǎng)上給愛好者下載,加上以后車聯(lián)網(wǎng)實現(xiàn),又可以減少車上的一些感應(yīng)器,通過車聯(lián)網(wǎng),靠近的車可以相互交換信息,知道旁邊車的行駛路徑和速度,自然不會發(fā)生交通事故。”
北理工研發(fā)無人駕駛車,始于1995年,當時與國防科大、南京理工、浙江大學、清華大學一起研發(fā)的第一代無人駕駛車,現(xiàn)在還在北理工的陳列室里。
然后是第二代、第三代,其應(yīng)用已經(jīng)在軍事領(lǐng)域初見成效。無論是龐大的裝甲車,還是小巧的模型車,無人駕駛的智能化程度在逐步提升。
2000年起,北理工的團隊獨立研發(fā)無人車,最近剛成立了“地面無人系統(tǒng)研究院”,集合計算機、自動化、車輛工程等專業(yè)人才研發(fā)無人駕駛系統(tǒng)。“我們能奪冠的優(yōu)勢在于對汽車工程的深入了解,還在人工智能上有長期技術(shù)積累的總結(jié)。”
下一代無人車計劃
“明年,‘視聽覺信息的認知計算’重大研究計劃將要實現(xiàn)2000km以上的長距離無人行駛目標,北理工的無人車會通過2000公里的高速路測試,我們計劃從北京跑到深圳。”龔建偉團隊與比亞迪的合作還將繼續(xù)。
為了提升穩(wěn)定性和可靠性,研發(fā)團隊將進項大量道路測試及相關(guān)研究工作,提升改平臺在自動駕駛方面的性能與指標,保證軟件代碼的可靠性和擴展性,同時,對電動助力系統(tǒng)長時間工作的可靠性進行實驗測試,采用更大功率的轉(zhuǎn)向電機控制器,提高對于多種路面的適應(yīng)性。
在操作方便性方面,將在短時間內(nèi)增加方向盤干預(yù)方式,即在自動駕駛模式下,只要人一握方向盤及其他操作件,就能感知到人的干預(yù),自動退出自動駕駛模式。
“還將在電動汽車、混合動力汽車平臺上探索無人駕駛車輛技術(shù),研究新能源車輛實現(xiàn)無人駕駛的特點。”
在龔建偉提供的視頻中,無人駕駛車載碼頭集裝箱貨物集中的地方已經(jīng)有應(yīng)用試驗,相對單純的路線、路況,是碼頭貨運車采用無人駕駛的一個有利條件。
無人駕駛汽車的控制設(shè)備
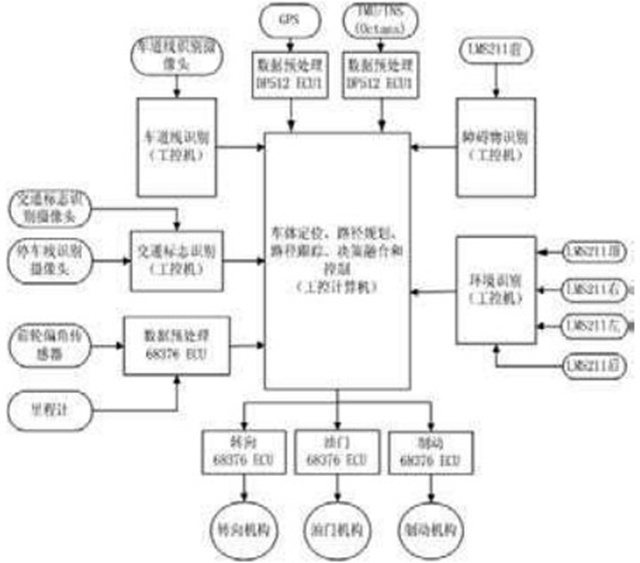
無人駕駛汽車的技術(shù)分布圖
無人駕駛汽車的技術(shù)分布圖
未來如果與地圖廠商合作,無人駕駛車就可以在更廣泛的道路上行駛,“不過,現(xiàn)在無人車還沒有到商用的地步,與地圖廠商的合作還是下一步。”
業(yè)界對車聯(lián)網(wǎng)的態(tài)度也將決定無人駕駛車的研發(fā)進程。專家預(yù)估未來兩三年,車聯(lián)網(wǎng)在北京、上海的試行,將帶動無人駕駛和人工駕駛進入混合運行模式。
分享到: